Passive degrees of freedom¶
Passive dofs!
[1]:
from blop.utils import prepare_re_env # noqa
%run -i $prepare_re_env.__file__ --db-type=temp
[2]:
from blop import DOF, Agent, Objective
from blop.digestion.tests import constrained_himmelblau_digestion
from blop.dofs import BrownianMotion
dofs = [
DOF(name="x1", search_domain=(-5.0, 5.0)),
DOF(name="x2", search_domain=(-5.0, 5.0)),
DOF(name="x3", search_domain=(-5.0, 5.0), active=False),
DOF(device=BrownianMotion(name="brownian1"), read_only=True),
DOF(device=BrownianMotion(name="brownian2"), read_only=True, active=False),
]
objectives = [
Objective(name="himmelblau", target="min"),
]
agent = Agent(
dofs=dofs,
objectives=objectives,
digestion=constrained_himmelblau_digestion,
db=db,
verbose=True,
tolerate_acquisition_errors=False,
)
RE(agent.learn("qr", n=16))
2025-06-19 02:04:43.567 INFO: Executing plan <generator object Agent.learn at 0x7f3c9c0947b0>
2025-06-19 02:04:43.570 INFO: Change state on <bluesky.run_engine.RunEngine object at 0x7f3c9d2ce830> from 'idle' -> 'running'
2025-06-19 02:04:43.571 INFO: running iteration 1 / 1
Transient Scan ID: 1 Time: 2025-06-19 02:04:43
Persistent Unique Scan ID: '5d7d1d8b-381d-40d8-ba0a-611cd19e0344'
New stream: 'primary'
+-----------+------------+------------+------------+------------+------------+------------+
| seq_num | time | x1 | x2 | brownian1 | brownian2 | x3 |
+-----------+------------+------------+------------+------------+------------+------------+
| 1 | 02:04:43.7 | -0.741 | -1.175 | -0.181 | -0.247 | 0.000 |
| 2 | 02:04:44.2 | -1.424 | -4.201 | 0.043 | 0.202 | 0.000 |
| 3 | 02:04:44.7 | -3.139 | -2.968 | -0.033 | 0.201 | 0.000 |
| 4 | 02:04:45.3 | -4.017 | -2.437 | -0.100 | -0.430 | 0.000 |
| 5 | 02:04:46.0 | -4.962 | 0.093 | 0.118 | -0.106 | 0.000 |
| 6 | 02:04:46.7 | -2.873 | 4.687 | 0.044 | -0.133 | 0.000 |
| 7 | 02:04:47.3 | -2.408 | 3.420 | 0.530 | -0.003 | 0.000 |
| 8 | 02:04:48.0 | -0.436 | 1.331 | 0.471 | -0.693 | 0.000 |
| 9 | 02:04:48.7 | 0.188 | 4.019 | 0.789 | -0.785 | 0.000 |
| 10 | 02:04:49.4 | 4.409 | 2.757 | 0.483 | -0.637 | 0.000 |
| 11 | 02:04:49.8 | 2.751 | 1.993 | 0.627 | -0.986 | 0.000 |
| 12 | 02:04:50.3 | 1.963 | 0.761 | 0.369 | -0.593 | 0.000 |
| 13 | 02:04:50.7 | 3.740 | -0.588 | 0.361 | -0.037 | 0.000 |
| 14 | 02:04:51.1 | 1.702 | -1.855 | -0.122 | -0.056 | 0.000 |
| 15 | 02:04:51.5 | 1.137 | -3.550 | 0.181 | -0.246 | 0.000 |
| 16 | 02:04:51.8 | 4.109 | -4.788 | 0.311 | -0.478 | 0.000 |
+-----------+------------+------------+------------+------------+------------+------------+
generator list_scan ['5d7d1d8b'] (scan num: 1)
/opt/hostedtoolcache/Python/3.10.17/x64/lib/python3.10/site-packages/bluesky/callbacks/fitting.py:171: RuntimeWarning: invalid value encountered in scalar divide
results = [np.sum(input * grids[dir].astype(float), labels, index) / normalizer for dir in range(input.ndim)]
2025-06-19 02:04:53.579 INFO: Change state on <bluesky.run_engine.RunEngine object at 0x7f3c9d2ce830> from 'running' -> 'idle'
2025-06-19 02:04:53.580 INFO: Cleaned up from plan <generator object Agent.learn at 0x7f3c9c0947b0>
[2]:
('5d7d1d8b-381d-40d8-ba0a-611cd19e0344',)
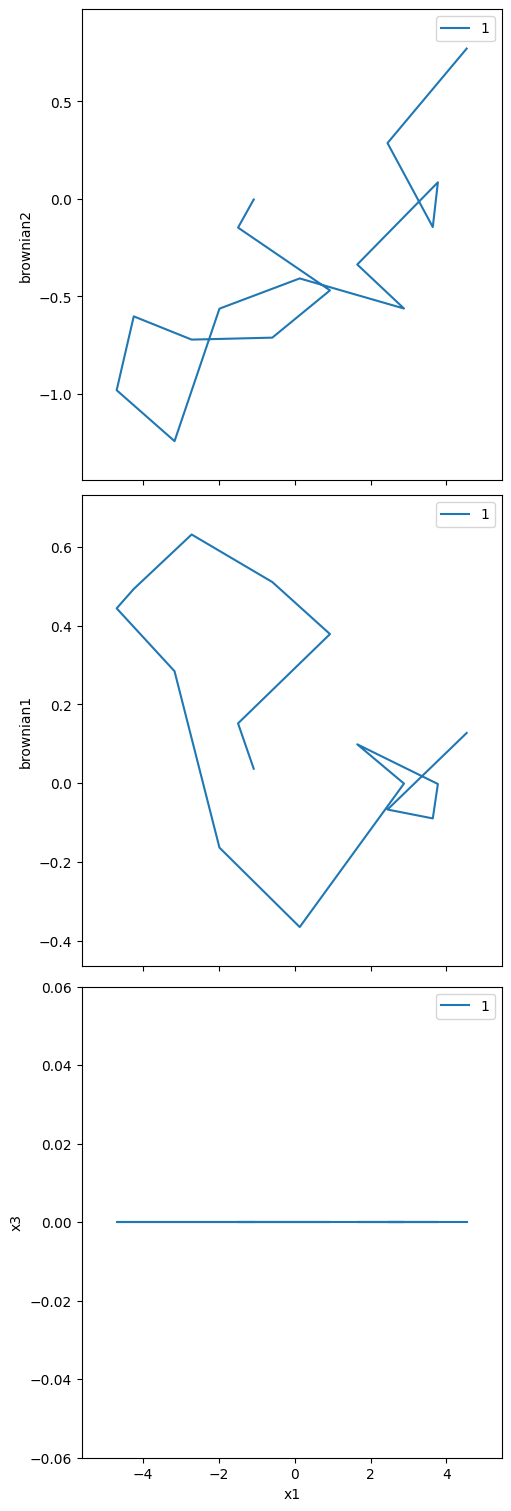
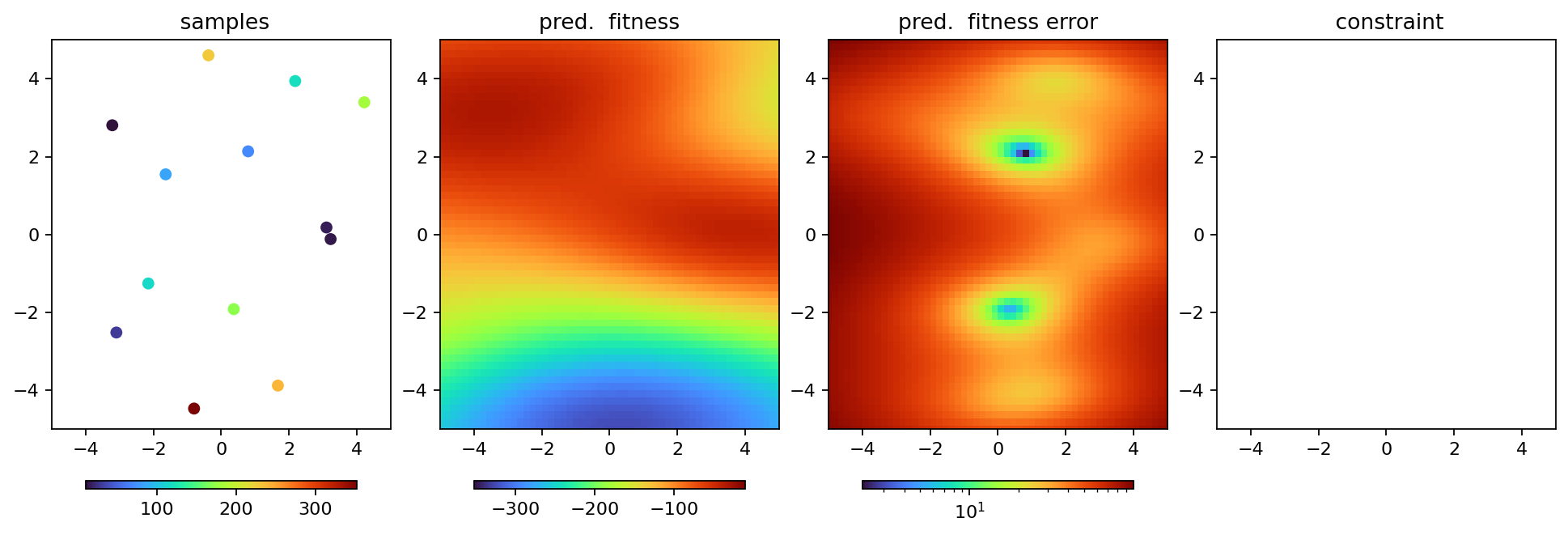
[3]:
agent.plot_objectives()